In the IDP autonomous robotics competition, teams start with raw materials, an Arduino and very limited sensors to design and build a delivery robot to navigate a maze and sort through parcels to delivery them to the right locations.
Note
We were the only team to achieve a 100% score!
The Cambridge University Engineering Department published a YouTube video of us accomplishing this.
There are a few main theoretical components of the robot software:
- a PID control loop with first-order derivative filtering
- precomputed pathfinding using the A* algorithm
- an event loop which executes tasks based on the robot and game state singletons
All the C++ code was intentionally structured using modern design patterns to be composable, object-oriented, and easy to understand.
- The
ArxContainerlibrary, which can be installed using the Arduino library manager.
- Since this is an Arduino project, the main file must be named
idp.ino, the same as the git folder. - Also, the C++ standard library is not available, so we have to use libraries specifically compatible with Arduino.
- The
.vscode/folder has been included with some settings that may be useful for development under VSCode. Any files that are machine-specific have been excluded from the repository using.gitignore.
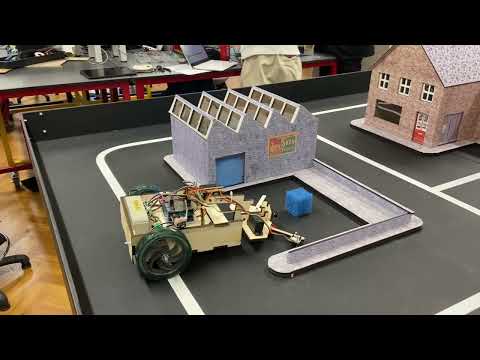
Here's a video we took while prototyping the robot: