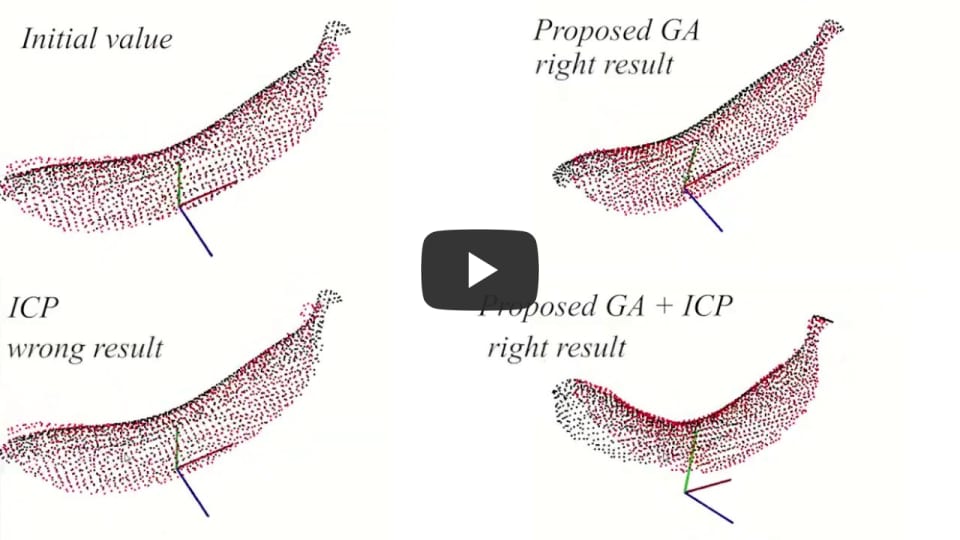
Robust pose estimation of objects with feature ambiguity based on point cloud.
Youtube video, If you cannot link to youtube, try bilibili.
-
Eigen3
-
Sophus
-
PCL
-
OpenCV: modify the
OpenCV_DIRto your path -
OpenMP
-
Boost
- add model and generate the offline data, skip to
add_model/README.mdto know how to. - capture the object point cloud in the scene add save it in the
datain the pcd format and in meters unit. - modify the
config.ini. The main item you need to modify ismodel_name,scene_name,cad_models_path,model_data_path, - in the root directory
mkdir build cd build cmake .. make -j4
./globalPipeline
@ARTICLE{10261416,
author={Li, Hai and Zeng, Qingfu and Zhuang, Tingda and Huang, Yanjiang and Zhang, Xianmin},
journal={IEEE Sensors Journal},
title={Accurate Pose Estimation of the Texture-Less Objects With Known CAD Models via Point Cloud Matching},
year={2023},
volume={23},
number={21},
pages={26259-26268},
keywords={Point cloud compression;Pose estimation;Solid modeling;Feature extraction;Three-dimensional displays;Genetic algorithms;Data models;Feature ambiguity;iterative closest point (ICP);point cloud matching;pose estimation;texture-less objects},
doi={10.1109/JSEN.2023.3316457}}
add_model part is modified from the object_identification_localization project.