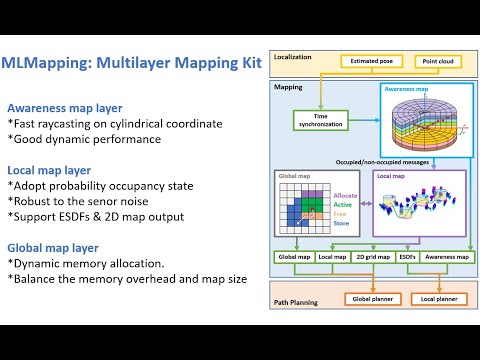
MLMapping is a multilayer mapping framework designed for autonomous UAV navigation applications. In this framework, we divided the map into three layers: awareness, local, and global. The awareness map is constructed on the cylindrical coordinate, which enables fast raycasting. The local map is a probability-based volumetric map. The global map adopts dynamic memory management, allocating memory for the active mapping area, and recycling the memory from the inactive mapping area. The framework supports different kinds of map outputs for the global or local path planners.
| Fast Raycasting | Large Scale Mapping | Autonomous UAV Navigation |
|---|---|---|
 |
 |
 |
Clone this repository to catkin src folder say: ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/HKPolyU-UAV/MLMapping.git
Install 3rd Part library
cd catkin_ws/src/MLMapping/3rdPartLib/
./install3rdPartLib.sh
Compile
cd ~/catkin_ws/
catkin_make
Download the Large Scale Mapping Dataset into the bag folder
decompress the rosbag
rosbag decompress corridor.bag
run
roslaunch mlmapping rviz.launch
roslaunch mlmapping mlmapping_bag_l515_t265.launch
Shengyang Chen(Dept.ME,PolyU): shengyang.chen@connect.polyu.hk