ROS package with URDF description macro for Raspberry Pi Cat
# Clone raspicat_description and install dependencies
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspicat_description.git
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/catkin_ws
catkin_make
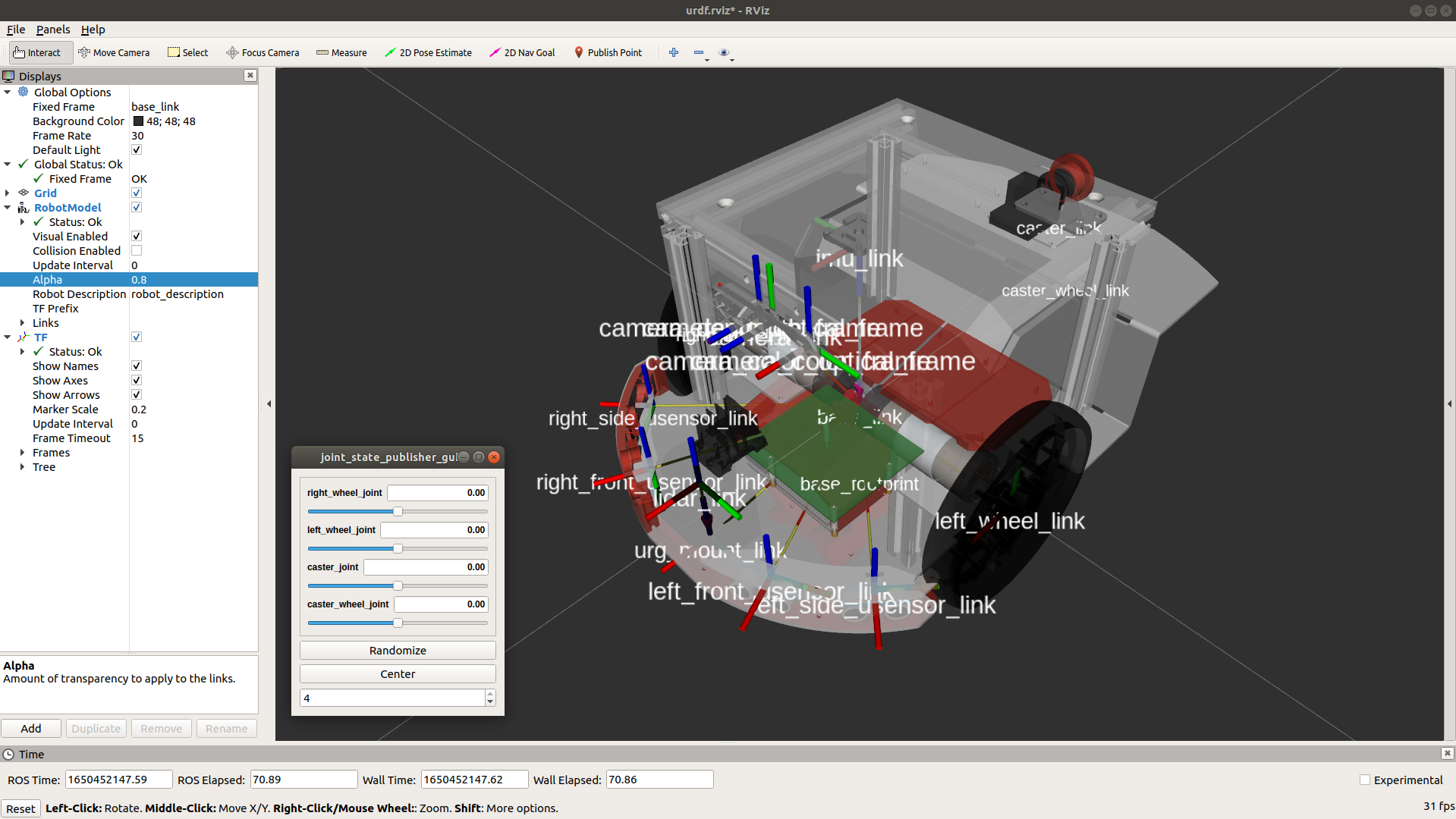
source devel/setup.bashDisplay the Raspberry Pi Cat robot model on RViz with the following comand:
roslaunch raspicat_description display_xacro.launch See RT Software Tutorials for more detailed information.
(C) 2021-2022 RT Corporation
This repository is licensed under the Apache License, Version 2.0, see LICENSE.
Unless attributed otherwise, everything in this repository is under the Apache License, Version 2.0.
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html