{kind=link}
{kind=link}
Capstone Project for the Coursera Specialization Modern Robotics: Mechanics, Planning, and Control
This project aims to simulate a mobile manipulator Kuka youBot. youBot is a mobile manipulator with 4 omnidirectional wheels and a 5 DOF robotic manipulator attached to the wheel base.
The mobile base is used to make up for the loss of configuration space, since the Manipulator is only 5 DOF.
The simulation is done using Python by the help of Modern Robotics Library and simulated in Coppelia Sim.
The Trajectory is defined between the inital position of the bot and makes the bot pick the cube and place it at the desired location. The desired trajectory is a list of End Effector position represented in SE(3).
A FeedForward-PI control then tracks the end effector along the trajctory. The function provides a Spatial Twist in the sapce frame which is then used to calculted to find the required joint and wheel velocites using the Jacobian. These velocities are then in then used to calculate the next state of the youBot.
The GIF of the working simulation is:
Video link if GIF loads slow.
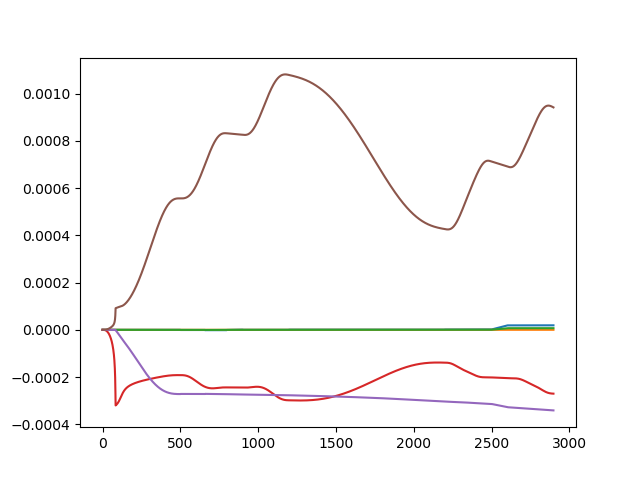
 And the Error plot of the Twist required to take robot from X_1 to X_2 is:
And the Error plot of the Twist required to take robot from X_1 to X_2 is:
The error is vey close to zero all along the trajectory.
- Design an algorithm that will activly avoid the singularity condition and avoid reaching the joint limits.
- Implemet weighted pseudo-Inverse of the Jacobian Matrix to force the youBot to use its mobile base more than its Manipulator
- Implement full state Trajectory Generation and Control.