how_to_control_raspimouse_on_sim_2
part2ではモータの動かし方についてです。
ラズパイマウスにはモータが2つあります。
このモータに信号を送ると動かすことができます。
まず、part1と同様にRaspberry Pi Mouse Simulatorの起動に従い、Gazeboを起動します。
次にモータを「通電」させます。
実機では、スイッチとは別に、デバイスファイルの操作によりモータの電源をON/OFFできます。
モータが通電していない場合、モータに信号を送っても回転せず、ラズパイマウスは動きません。
シミュレータでは実際に電流が流れているわけではありませんが、実機と同じ操作をすることで、モータに送った信号通りにシミュレータ上のモータが動くようになります。
次の操作で通電させることができます。
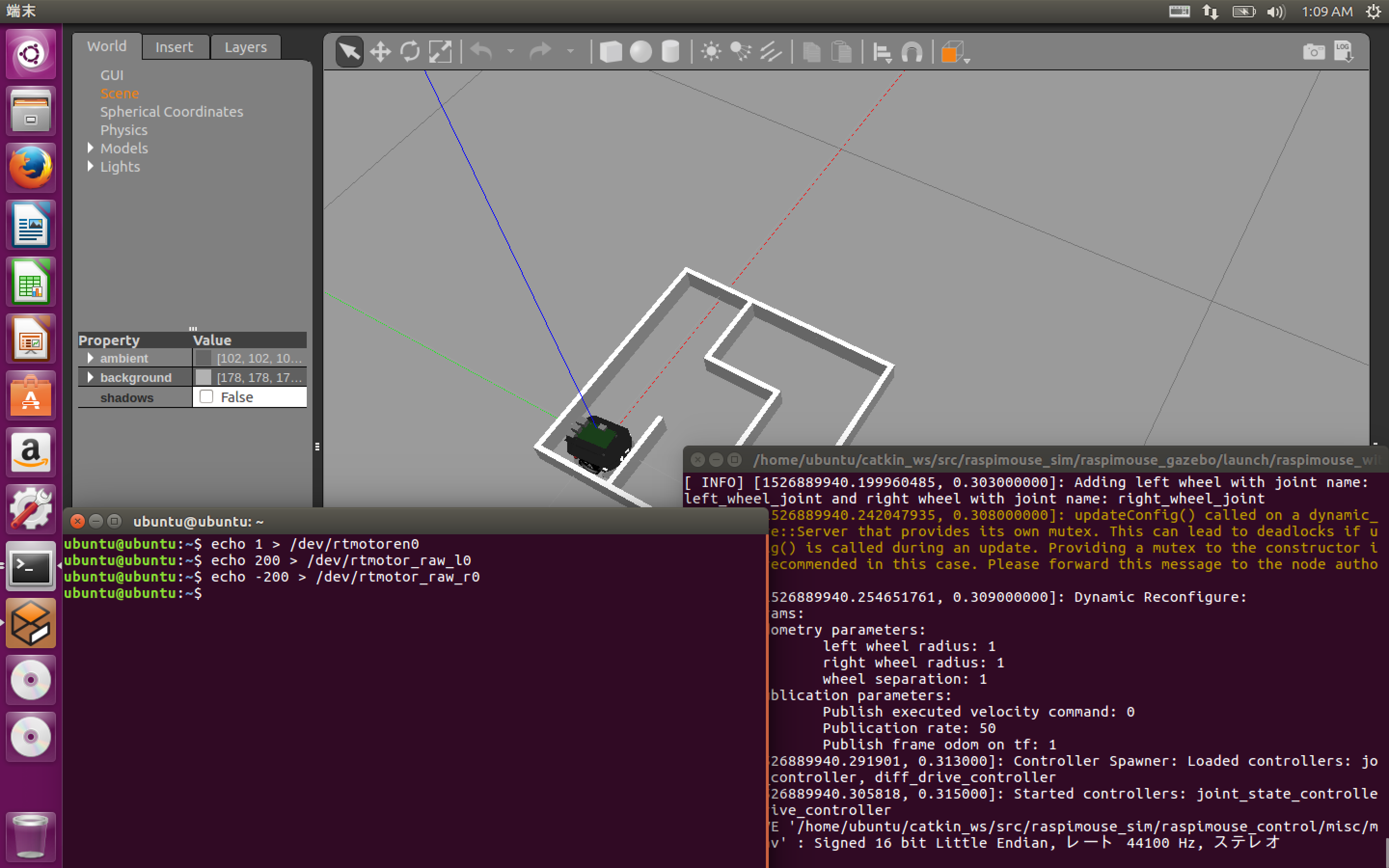
echo 1 > /dev/rtmotoren0
モータが通電した場合、実機では音はなりませんが、シミュレータではピコという音がなります。(効果音は効果音ラボさんからお借りしました。)

ROSを介さずシミュレータ上のラズパイマウスを動かすことができます。
echo 200 > /dev/rtmotor_raw_l0
echo -200 > /dev/rtmotor_raw_r0
1行目は左モータに順方向に200Hz与えています。
2行目は右モータに逆方向に200Hz与えています。
2行目まで実行したとき、ラズパイマウスがその場で回転していたら正しく実行できています。