how_to_control_raspimouse_on_sim_4
part4ではコントローラを用いてシミュレータ上のラズパイマウスを動かす方法を紹介します。
コントローラを用いることにより、キーボードで操作するより自由に操作することができます。
コントローラで動かすために、Ryo Okazakiさんのraspimouse_game_controllerを使用させていただきます。
git clone https://github.com/zaki0929/raspimouse_game_controller.git
cd ~/catkin_ws
catkin_make
次にコントローラを扱うために必要なjoy_nodeをインストールします。すでにjoy_nodeをインストールしている場合は行わなくて大丈夫です。
sudo apt install ros-kinetic-joy
以上で準備完了です。
今回はLogicool Wireless Gamepad F710を使用します。
詳しくはraspimouse_game_controllerのREADMEをご覧下さい。
まず、前回と同様にRaspberry Pi Mouse Simulatorの起動に従い、Gazeboを起動します。
別のターミナルで、以下のコマンドを実行します。
このコマンドが、コントローラでラズパイマウスを動かすときに使用するコマンドです。実行すると自動的にモータが通電します。
roslaunch raspimouse_gamepad_control run_with_base_nodes.launch
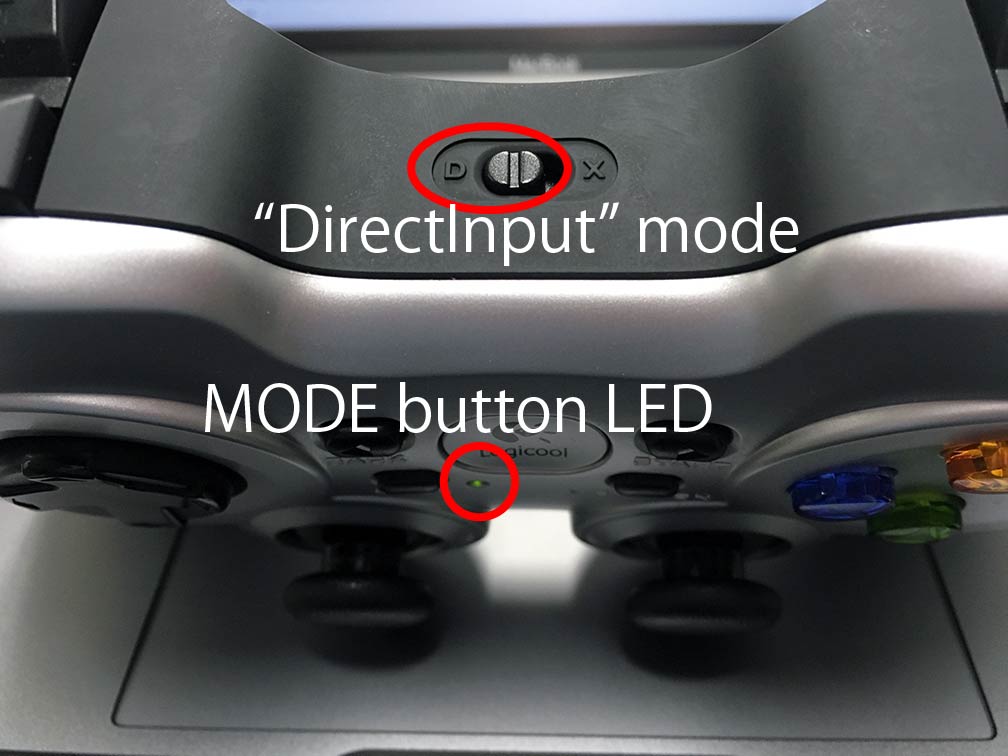
次に、コントローラの上のスイッチがDの方に傾いていて、MODEのランプが付いていることを確認します。
操作するときはXを押しながら、左の十字キーを押します。


[ERROR] [1526893382.851884948]: Couldn't open joystick /dev/input/js0. Will retry every second.
上記のエラーが出て、コントローラが反応しないことがあります。
コントローラを接続し直してみて下さい。